

Si después de leer la entrada tienes cualquier duda puedes abrir un tema en el grupo de google y entre todos la resolveremos.
Una de las ventajas de Escornabot es que puedes pasar de una versión a otra aprovechando la mayoría de las piezas de una manera muy sencilla y rápida.
Manos a la obra!!
¿Qué necesito?
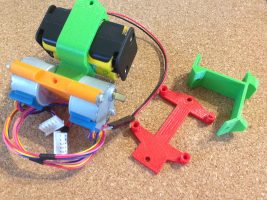
- Pieza impresa en 3D, sujeción placa v2.12 de XDeSIG, la puedes descargar aquí
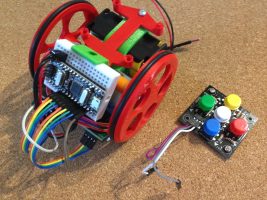
- La PCB de la versión 2.12 con los componentes soldados
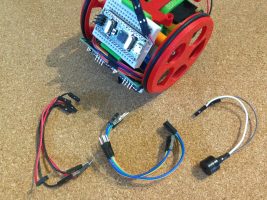
- Un portapilas con los cables al aire o puedes aprovechar el que tienes con los conectores de la versión DIY.

Desnudando a nuestro escorni DIY
- Desatornillamos la placa botonera y desconectamos los tres cables:
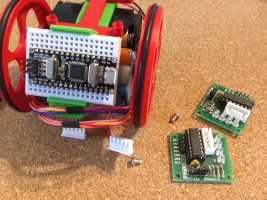
- Desconectamos el cableado de los drivers de los motores (ocho de colores, dos rojos, dos negros) y el buzzer:
- Desatornillamos los dos drivers de motor (placas verdes) y desconectamos los conectores de los dos motores:
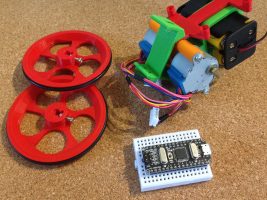
- Retiramos las dos ruedas y la protoboard:
- Desatornillamos la pieza impresa que sujeta la placa botonera y la protoboard:
- Colocamos un portapilas con los cables al aire o podemos aprovechar el de la versión DIY con el conector puesto:

Vistiendo a nuestro escorni 2.12
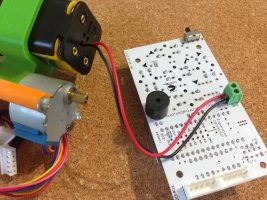
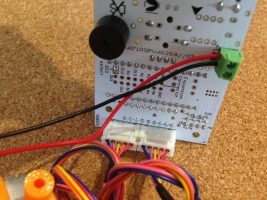
- Conectamos los cables del portapilas al conector de la placa (con el interruptor en OFF) Viene todo marcado en la placa.
El cable rojo lo ponemos en el positivo + y el cable negro en el negativo – o GND
- Atornillamos la pieza impresa 3D que sujetará la nueva placa. Mira la posición que lleva en la imagen, la parte que tiene un entrante va en el lado de los motores:
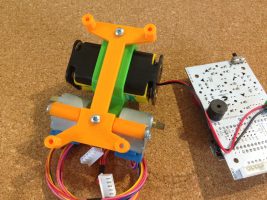
- Ponemos los conectores de los motores, cada motor va a un conector.
Los motores indican la parte delantera del robot, la bola es la parte trasera:
- Atornillamos la placa en la pieza impresa y ya lo tenemos:

- Colocamos las ruedas y nos quedará cargar el código nuevo. Después movemos el interruptor a la posición ON y a corretear con nuestro escorni v2.12

Todos los códigos realizados por Rafa Couto para Escornabot los tenéis en este repositorio.
- Descargamos el archivo .zip de la versión que queramos.
- Lo descomprimimos, entramos en la carpeta «Config», dentro de esta hay otra carpeta con el nombre «EscornaCPU-2.12», ese es el código que debemos cargar en nuestro Arduino NANO
Be freak and keep on smiling 🙂

Licencia Creative Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0).
¿Cómo pasar de la versión DIY a la versión 2.12?


