

Si quieres utilizar Escornabot con un dispositivo móvil, la mejor opción es con un módulo Bluetooth. En esta entrada tienes toda la información que necesitas. Aunque utilices otra versión, las aplicaciones y el funcionamiento es el mismo.
Agradecimiento especial a Esther Borao por ayudarme 🙂
También a Miguel Gesteiro e Ismael Serrano por una aplicación sensacional
A Jorge Lobotic porque es un crack y su blog es oro puro
Algo de base antes de empezar
No voy a explicar el funcionamiento de un módulo Bluetooth porque ya lo han documentado los que saben, así que os dejaré enlace a la wiki de makespacemadrid donde lo tienen documentado de lujo.
Explicación Módulo Bluetooth MH-10 por Makespace Madrid
¿Qué necesito?
- 2 cables macho-macho de 10cm
- 4 cables macho-hembra de 10cm
- 1 Bluetooth Ble HM-10 o compatible (este he utilizado yo)
- APP Escornabot para Android
- APP Escornabot para Iphone
Esta aplicación SOLO FUNCIONA CON MÓDULOS BLUETOOTH BLE, si utilizas un Bluetooth normal el HC-05 o HC-06 lee esta entrada de Lobotic donde explica como hacerlo y tienes enlace a la aplicación que necesitarás descargar.
¿Dónde pongo todas estas movidas?
2 cables macho-macho
Primero necesitaremos los 2 cables macho-macho para ampliar los GND disponibles (Yo lo hago así porque me apetece tener el teclado conectado a la vez, puedes pinchar directamente en los pines 5V y GND que ocupan los cables del teclado)
Si tienes dudas del funcionamiento de una protoboard Enrique te lo explica en Rincon Ingenieril
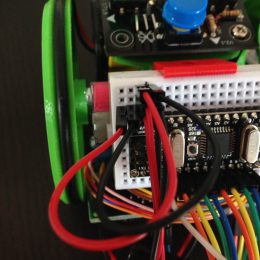
Pincharemos el cable rojo encima del rojo y el negro encima del negro de las placas de los drivers que controlan los motores (placas verdes con los leds que se iluminan al avanzar el robot)
Después en las dos filas que tenemos libres la otra punta, de este modo tendremos dos filas libres. Una la usarmos para conectar el cable de las pilas y la otra para poner el GND del Bluetooth
4 cables macho-hembra de 10cm
1 Bluetooth Ble HM-10 o compatible
Relación de conexiones entre las patillas del Bluetooth BLE y el Arduino Nano:
| Bluetooth BLE | Arduino Nano |
| RX | TX |
| TX | RX |
| GND | GND |
| VCC | 5V |
Para corriente ya sabéis que me gusta usar usar cable de color negro para GND o negativo y cable rojo para VIN, VCC, 5V o positivo.
El cable negro lo colocaremos en la patilla GND del Bluetooth y la otra parte encima del negro que hemos ampliado anteriormente.
El cable rojo lo colaremos en la patilla VCC del Bluetooth y la otra parte encima del cable de corriente 5V del teclado.
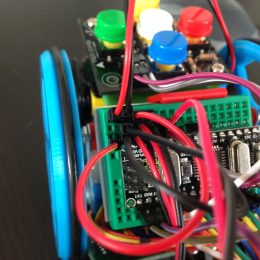
Usaremos otros dos cables macho-hembra para conectar las patillas RX, TX del Bluetooth con las del Arduino Nano. Siempre que conecto un bluetooth con un Arduino hay que cruzar RX con TX. De manera que la patilla RX del Bluetooth la conectaremos al TX del Arduino y la de TX al RX.

¿Qué cambio en la programación antes de darle corriente?
Entramos en la pestaña configuration.h
Le decimos a nuestro robot que utilizaremos la conexión por Bluetooth.
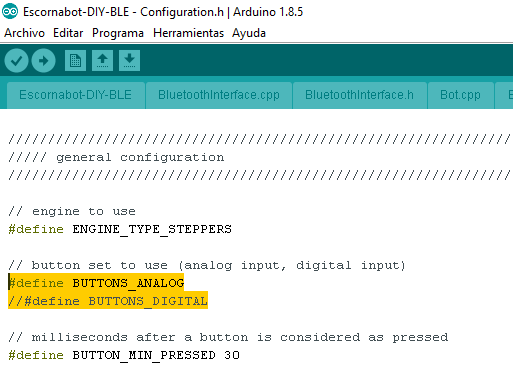
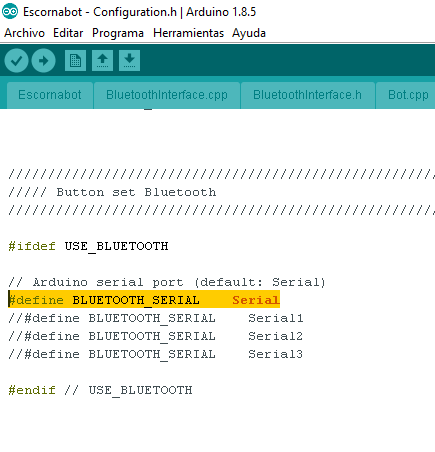
Buscamos la parte del código que muestra la imagen:
Dejamos la línea #define BUTTONS_ANALOG para poder utilizar el teclado
Por defecto el Bluetooth lo tenemos activado en la programación, al dejar esta línea activa le estamos diciendo al robot que queremos tener la posibilidad de usar el bluetooth y el teclado según queramos.
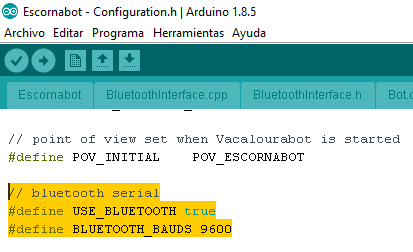
Revisamos si tenemos activada la opción Bluetooth y los baudios a los que enlazará.
En la entrada de Makespace Madrid que hemos comentado al principio podéis ver como comprobar los baudios a los que esta programado vuestro módulo Bluetooth.
En mi caso va a 9600 que es el valor por defecto que lleva la programación. En el caso de no conectar podéis ir probando otros valores por si en el vuestro estuviera cambiado.
Por último, activamos la línea del Serial
Quitamos las dos barras inclinadas de la línea «//#define BLUETOOTH_SERIAL Serial«, veremos que pasa de color gris a color negro y la palabra Serial final se pone en amarillo.
Instalación aplicación Escornabot
Descargamos la aplicación gratuita en nuestro móvil, disponible tanto para iOS y Android.
Conectamos la alimentación y vinculamos el Bluetooth con la APP
Ya tenemos todo preparado, vamos al lío.
- Conectamos la alimentación del robot justo encima de la ampliación que hicimos al inicio. El robot debería dar el pitido del check inicial y el led rojo del Bluetooth comenzar a parpadear.
- Entramos en la aplicación, buscamos el dispositivo Bluetooth y nos conectamos, una vez enlazados la luz del Bluetooth dejará de parpadear para quedarse fija.

- Pulsamos en la parte inferior en el dibujo del círculo con la flechas y pasamos a la pestaña del teclado, si todo ha ido bien cuando pulsemos cada tecla en nuestro teléfono el robot emitirá un pitido y al pulsar el botón blanco comenzará a caminar.

Por favor, dudas y preguntas a través del grupo de google
🔝 Primer @escornabot #versionDIY conectado por #Bluetooth que monto gracias a la ayuda de @EstherBorao
Genial la aplicación realizada por Ismael Serrano y @mgesteiro 😍
La vamos a liar parda y lo sabes 🤓 pic.twitter.com/70SmgUgvqr
— Pablo Rubio EscornaFAN (@pablorubma) 26 de mayo de 2018
Be freak and keep on smiling 🙂

Licencia Creative Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0).


