

Segunda parte de la serie «Taller Escornabot DIY».
Si hemos seguido los pasos de la primera parte tendremos nuestro Escornabot DIY desmontado. Ahora vienen las risas, hay que volverlo a montar y que funcione. No queremos niños y niñas traumatizadas porque su robot no ha funcionado.
Puedes ver el montaje desde el primer tornillo siguiendo la guía paso a paso.
Voy a empezar desde donde lo dejamos en la anterior entrada porque es hasta el paso máximo que suelo llegar en los talleres. Suelen ser de 1 hora y media, entre que llega todo el mundo pierdes 15 minutos y lo mejor es no intentar abarcar demasiado.
*Video de Jesús López, sirve como resumen de todo el proceso
Es IMPORTANTE avanzar por niveles. NO se pasa al siguiente paso hasta que todas las personas no han terminado.
Intenta que se ayuden buscando la colaboración, NO la competición.
Montando en 3, 2, 1
Espero que vengas a tope de power y paciencia porque empieza el Rock&Roll.
Atornillamos los drivers y colocamos los conectores blancos de los motores
Recuerda, llama a los componentes de manera que todo el mundo lo entienda. Los drivers, son las placas verdes con pinchos y donde va el conector blanco de los motores.
Puedes explicar su función de nuevo o hacer preguntas para ver si se acuerdan.
Insiste en que cada motor debe ir emparejado con su driver o los robots se moverán al revés y tendrás un dolor de cabeza al terminar el taller.
Colocamos el porta pilas y atornillamos la sujeción de la bola
Este punto es sencillo pero el porta pilas tienen una posición «buena» para que la pieza donde lo insertamos no quede forzada.
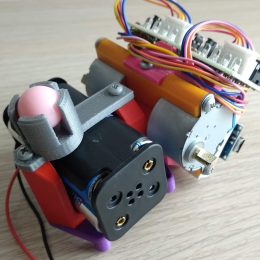
Si te fijas en la foto, el plástico negro tiene que estar en la parte inferior. La pieza encaja mejor y facilita el centrado de la misma.
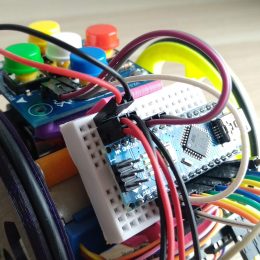
Ahora dejaremos de seguir el mismo orden del desmontaje y nos vamos a poner a cablear.
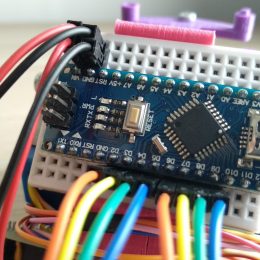
Colocamos los cables arcoíris que van de los drivers a la protoboard
Son de ocho cables, que tendremos separados en dos tiras de cuatro cables (azul-verde-amarillo-naranja) y los llamaremos cables arcoíris
Primero comenzaremos colocando el cabezal hembra en los cuatro pinchos superiores de los Drivers la relación es:
- IN1 – Azul
- IN2 – Verde
- IN3 – Amarillo
- IN4 – Naranja

Debes ser muy cansina en este punto, repetir cien veces como van colocados los cables y aun así alguien los pondrá mal. Comprueba uno a uno cada robot antes de pasar al siguiente paso.
Si se colocan mal, los robots van a caminar free style.
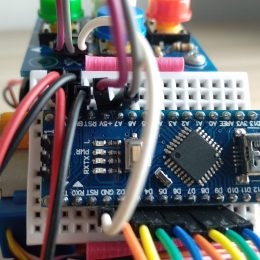
Una vez que tienen las dos parejas de cuatro cables en los drivers, pasamos a colocarlos en la protoboard. La correlación es la siguiente:
- D9 – Azul
- D8 – Verde
- D7 – Amarillo
- D6 – Naranja
- D5 – Azul
- D4 – Verde
- D3 – Amarillo
- D2 – Naranja

Repítelo mil veces, haz bromas, juegos con los colores, pregunta una y otra vez. Cada cable debe quedar en su sitio o morirás al terminar el taller 🙂
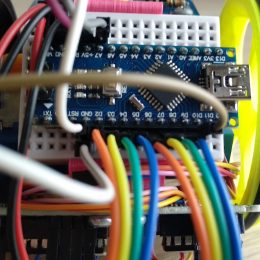
Colocamos los cables rojos y negros de corriente de los drivers
Con cables rojos y negros, TROLEA siempre. Si los juntan explotarán, enséñales las salidas de emergencia por si algún robot empieza a arder y cosas de este tipo.
En cada driver colocaremos dos cables, uno rojo o otro negro.
- Cable rojo = Positivo +
- Cable negro = Negativo –

En los drivers viene muy pequeñita la simbología de + y – los que tenemos una edad nos cuesta ver las marcas. Ten paciencia, enséñales donde va cada cable con uno que vayas montando a la vez o con imágenes si dispones de pantalla o proyector.
Revisa este punto, es un clásico invertir la polaridad.
Ahora colocaremos el otro extremo de los cables en la protoboard:
- VIN = Cables Rojos
- GND = Cables Negros
Colocamos los cables en la botonera y después la atornillamos
Antes de atornillar la botonera, coloca los tres cables:
- Blanco = GND = Pincho más próximo al botón azul
- Gris = SIG = Pincho central
- Morado = 5V = Pincho del borde exterior
Después atornilla la botonera y por último coloca los tres cables en la protoboard:
- Blanco = GND = Al lado del cable naranja, parte inferior protoboard
- Morado = 5V = Dejando un hueco de separación con el cable negro, parte superior de la protoboard
- Gris = A4 o A7 (Dependiendo de lo que tengamos en la programación) parte superior de la protoboard.
Colocamos las ruedas
En este punto les dejo que se intercambien las ruedas si les gusta otro color, aunque es arriesgado y se puede liar parda.
Recuerda, no deben apretar como si se fuera a terminar el mundo o es posible que partan la pieza.
Colocamos el buzzer y los dos cables
Es un paso sencillo pero hay una mezcla entre cansancio y hype de quiero ver mi maldito robot caminar. Keep calm and:
- Blanco = GND = Debajo del cable de la botonera blanco que pusimos antes. Parte inferior de la botonera.
- Marrón = D10 = Al lado del cable azul. Parte inferior de la botonera
Colocar los cables de corriente del porta pilas
Hemos llegado al momento más tenso del taller, todas deberían tener el protector colocado en el porta pilas.
Si ves que son un peligro y te la han liado durante todo el taller, puedes ir individualmente enchufando los robots. Aunque seguramente escuches pitidos antes de tiempo.
Si se han portado medio bien, déjales que lo conecten. Yo me la suelo jugar bastante y pocas veces he tenido incidentes. Es más, los incidentes siempre han sido con personas mayores y formadas.
Bromea otras mil veces con los cables, recuérdales que los rojos van con los rojos y los negros con los negros, que no se deben mezclar, etc…
A disfrutar o correr
Si todo ha ido bien a disfrutar y terminar jugando el taller. Yo siempre doy libertad absoluta, el que se quiere marchar se puede ir y el que se quiere quedar jugando un rato mientras recojo adelante.
Si todo ha ido mal, sal corriendo y no mires atrás.
Espero que os sirva, cualquier duda o sugerencia no dudes en escribirme un correo o mensaje por redes sociales.
Be freak and keep on smiling 🙂

Licencia Creative Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0).


