

Tarde o temprano te toca una partida de motores «defectuosos» y lo sabes. Te volverás majara durante unos días revisando todas las conexiones y la configuración hasta que tengas la suerte de encontrar algo de información sobre motores mal cableados.
Artículo de referencia en el repositorio Escornabot de GitHub
¿Cómo identifico el problema?
Tienes todo en su sitio, hiciste el test de botonera anotando los valores y revisando la pestaña «configuration.h» para cambiar los valores, has revisado 100 veces que cada motor esta colocado en su driver o conector pero el escorni no te hace ni caso 🙁
- Pulsas adelante, va atrás
- Pulsas atrás, va adelante
- Pulsas derecha, gira izquierda
- Pulsas izquierda, gira derecha
Decides cambiar la conexión de los motores, pensando que así se soluciona pero solo corrige el movimiento adelante-atrás. Sigue invirtiendo el giro derecha-izquierda.
¡Si te pasa esto o algo parecido te ha tocado premio! ¡Tienes el motor con el cableado cambiado!
¿Esto se puede arreglar o tengo que matar al chino?
Llegados a este punto habrá dos tipos de personas; las que han entrado en el enlace que hay al comenzar esta entrada y las que no.
Como esta muy bien explicado aquí no voy a entrar en detalles para sacar los conectores.
Un apunte, no te fijes en los colores de los cables. Fíjate en el orden de correspondencia de los cables que salen del motor hasta llegar al conector:

Cuando hagamos esta comprobación, debemos colocar los motores en la misma orientación que aparece en la imagen, tenemos que ver las partes metálicas del conector blanco y no al contrario.
El motor de la izquierda no tiene el cableado bien para manejar Escornabot. Correspondencia de colores, mirando la imagen de izquierda a derecha (más adelante tienes un cuadro con el cableado correcto si te llegan motores de este tipo):
| Salida cable motor | Cable en conector blanco |
| 1 – Rosa | 1 – Azul |
| 2 – Azul | 2 – Rosa |
| 3 – Rojo | 3 – Amarillo |
| 4 – Amarillo | 4 – Naranja |
| 5 – Naranja | 5 – Rojo |
Ahora el motor de la derecha de la imagen, el que tiene bien los cables para Escornabot:
| Salida cable motor | Cable en conector blanco |
| 1 – Azul | 1 – Azul |
| 2 – Rosa | 2 – Rosa |
| 3 – Rojo | 3 – Amarillo |
| 4 – Naranja | 4 – Naranja |
| 5 – Amarillo | 5 – Rojo |
Repito de nuevo, no os fijéis en los colores hay que mirar la correspondencia en el orden de salida del motor y llegada al conector
Los únicos cables que debes tener invertidos al llegar al conector blanco son la posición 3 (rojo) y la posición 5 (amarillo). Los cables de las posiciones 1,2 y 4 permanecen en el mismo orden de conexión.
Por lo tanto, el motor que estaba mal cableado debería quedar así:
| Salida cable motor | Cable en conector blanco |
| 1 – Rosa | 1 – Rosa |
| 2 – Azul | 2 – Azul |
| 3 – Rojo | 3 – Naranja |
| 4 – Amarillo | 4 – Amarillo |
| 5 – Naranja | 5 – Rojo |
¿Sigues teniendo dudas?
Este vídeo ayuda a comprender mejor el problema y su solución.
¡Pero yo no quiero cambiar los cables!
Si eres una persona perezosa y no te apetece cambiar los cables tienes otra opción. Es la que yo estaba haciendo hasta ahora pero no es aconsejable (sobre todo cuando la flota de escornis empieza a ser grande)
Modifica los valores de la botonera en la pestaña «configuration.h». Si tienes dudas para encontrar la pestaña, consulta este tutorial.
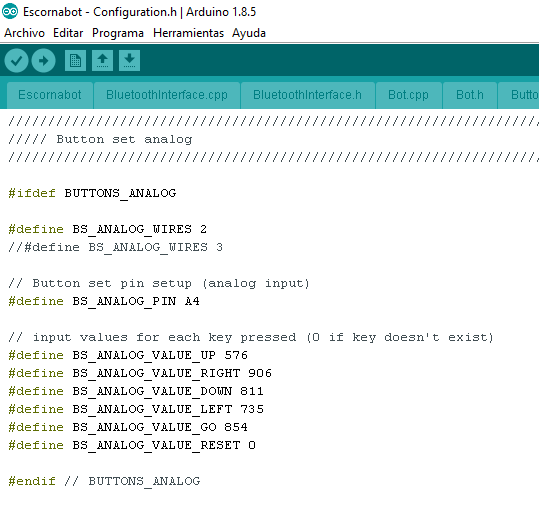 Es tan fácil como cambiar los valores de los botones que te den problemas, por ejemplo:
Es tan fácil como cambiar los valores de los botones que te den problemas, por ejemplo:
Al pulsar derecha, gira a la izquierda
El valor del botón BS_ANALOG_VALUE_RIGHT se lo pongo al valor del botón BS_ANALOG_VALUE_LEFT y el valor del botón LEFT se lo pongo al valor del botón RIGHT.
Cualquier duda o problema abre un tema en el grupo de google Escornabot
Be freak and keep on smiling 🙂

Licencia Creative Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0).


