

Apartado para la versión Escornabot Singularis 2.12 XDeSIG con listados de componentes, errores comunes, tiendas que venden kits y guías.
Material recopilado de Rafa Couto y XDeSIG
Si tienes dudas, deja tu pregunta en el Grupo Google Escornabot
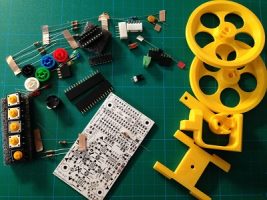
Piezas impresas 3D necesarias
Piezas exclusivas de la versión
| Sujeción placa |
| escornacpu-2_10-bracket.stl |
 |
Piezas comunes con las otras versiones
| Rueda izquierda | Rueda derecha |
| wheel-l.stl | wheel-r.stl |
 |
 |
| Sujeción pilas | Sujeción motores |
| battery-bracket.stl | motoresMotorBracket.stl |
 |
 |
| Sujeción bola |
| ballcaster-v2.stl |
 |
Componentes
Para esta versión tienes una guía de soldadura creada por XDeSIG donde puedes ver cada componente, disponible en tres idiomas:
Si quieres consultar el listado de componentes para comprar por tu cuenta, son los mismos que la versión Brivoi Compactus.
¿Dónde comprar un kit?
Si eres de los que no les gusta complicarse, varias opciones:
- Pedir a Xabier un kit xdesig@gmail.com . Link con las diferentes opciones
- BricoGeek
- Iberobotics
- Micro-Log
- Orballo Printing
- Electron Perdido
Yo simplemente os informo, no me llevo comisión. Cada uno es libre y responsable de lo que compra. Pregunta si se incluyen las piezas o cualquier detalle que creas importante antes de realizar la compra.
Guía montaje
También tienes un .pdf para descargar la guía de montaje del cuerpo
Si algún enlace a las guías da error, tienes recopilados todos los documentos de esta versión en el GitHub de Xabier.
Vídeo tutorial de montaje por BricoGeek
Es obligatorio ver esta obra de arte. Incluye la soldadura de todos los componentes de la placa botonera y consejos muy útiles si acabas de empezar.
Características de la placa
Los más curiosos pueden consultar todas las características de la placa
Chasis especial realizado por Cantabrobots
Un chasis muy gracioso para esta placa es el que ha creado Cantabrobots, puedes descargar los archivos .stl para imprimir de su página web

Errores comunes
- Tengo todo bien pero algún movimiento del robot lo invierte. Revisa esta guía, probablemente tengas un problema con el cableado de los motores.
- El ordenador no reconoce mi Arduino NANO, es probable que sea un problema de drivers. En el caso de placas chinas genéricas, necesitan los drivers CH340. Dependiendo de la versión de nuestro Sistema Operativo o configuración, algunas veces no los instala automáticamente.
- Error al subir el código. Comprueba si en tu IDE Arduino que en la opción herramientas-procesador, sale para seleccionar «Old Bootloader». Tienes toda la información aquí.
Be freak and keep on smiling 🙂

Licencia Creative Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0).